Бесколлекторный электродвигатель постоянного тока. Общие сведения и устройство прибора

Контроллеры электродвигателей такого типа зачастую питаются благодаря постоянному напряжению, отчего и получили своё название. В англоязычной технической литературе вентильный электродвигатель называют PMSM или BLDC.
Бесколлекторный электродвигатель был создан в первую очередь для оптимизации любого электродвигателя постоянного тока в целом. К исполнительному механизму такого устройства (особенно к высокооборотному микроприводу с точным позиционированием) ставились очень высокие требования.
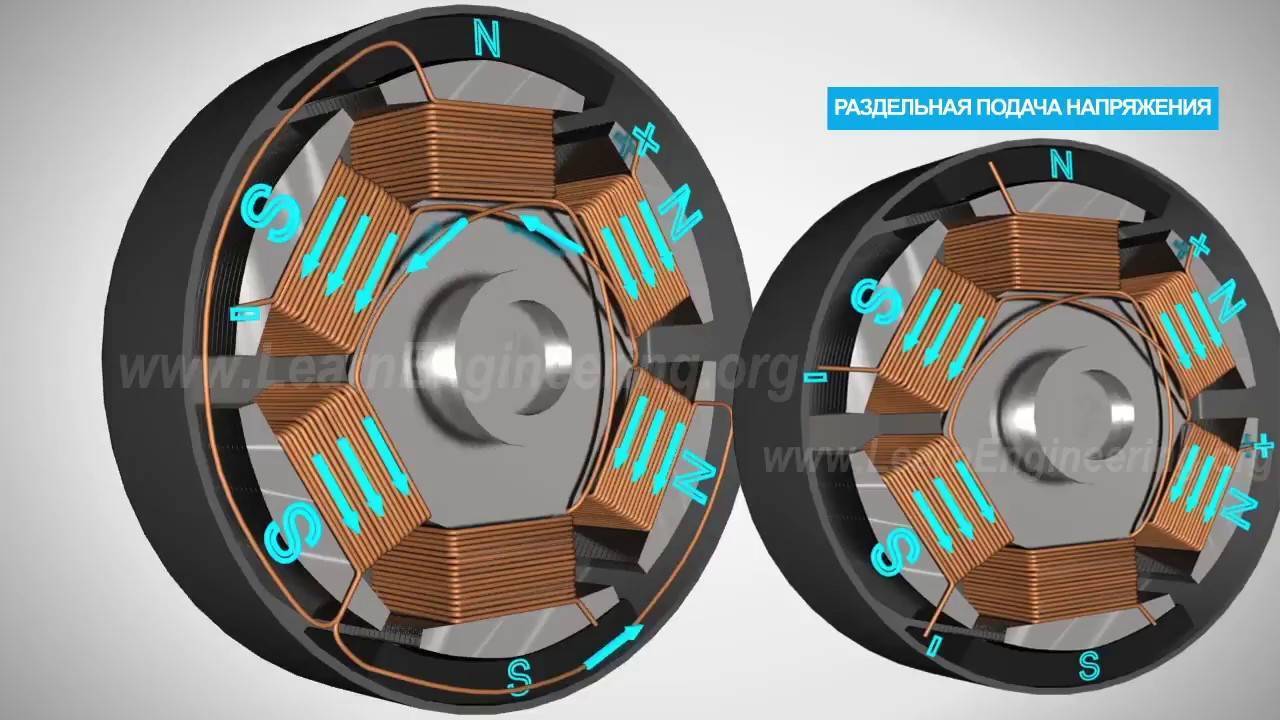
Это, пожалуй, и обусловило использование таких специфических приборов постоянного тока, бесколлекторные трёхфазные двигатели, также называемые БДПТ. По своей конструкции они практически идентичны синхронным двигателям переменного тока, где вращение магнитного ротора происходит в обычном шихтованном статоре при наличии трёхфазных обмоток, а количество оборотов зависит напряжения и нагрузок статора. Исходя из определённых координат ротора, происходит переключение разных обмоток статора.
обмотки статора выполняют функцию фиксирующего элемента
Если одна из обмоток будет выключена, то будет измеряться и в дальнейшем обрабатываться тот сигнал, который был наведён, однако, такой принцип работы невозможен без профессора обработки сигналов. А вот для реверса или торможения такого электродвигателя мостовая схема не нужна – достаточно будет подачи в обратной последовательности управляющих импульсов на обмотки статора.
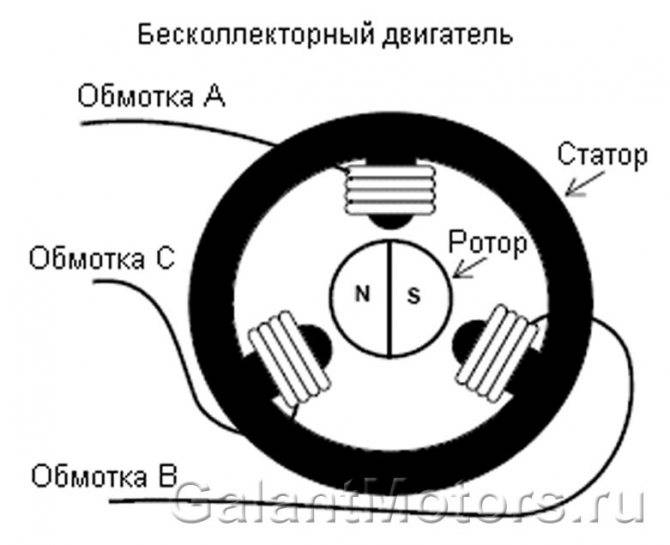
В ВД (вентильном двигателе) индуктор в виде постоянного магнита расположен на роторе, а якорная обмотка – на статоре. Исходя из положения ротора, формируется напряжение питания всех обмоток электродвигателя. При использовании в таких конструкциях коллектора, его функцию будет выполнять в вентильном двигателе полупроводниковый коммутатор.
Основное отличие синхронного и вентильного двигателей заключается в самосинхронизации последнего при помощи ДПР, что обусловливает пропорциональную частоту вращения ротора и поля.
Чаще всего бесколлекторный электродвигатель постоянного тока находит применение в следующих сферах:
- морозильное или холодильное оборудование (компрессоры);
- электропривод;
- системы нагрева воздуха, его кондиционирования или вентиляции.
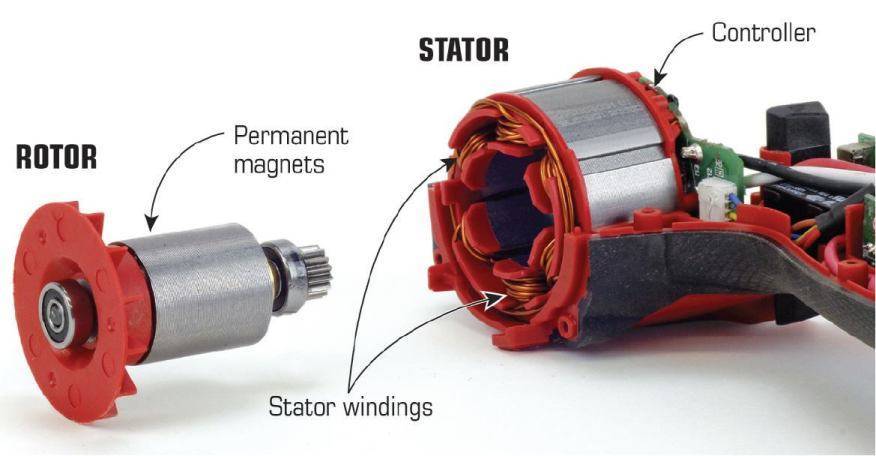
Статор
Это устройство имеет классическую конструкцию и напоминает такой же прибор асинхронной машины. В состав входит сердечник из медной обмотки (уложенной по периметру в пазы), определяющей количество фаз, и корпус. Обычно синусной и косинусной фаз достаточно для вращения и самозапуска, однако, часто вентильный двигатель создают трёхфазным и даже четырёхфазным.
Электродвигатели с обратной электродвижущей силой по типу укладки витков на обмотке статора делятся на два типа:
- синусоидальной формы;
- трапецеидальной формы.
В соответствующих видах двигателя электрический фазный ток меняется также по способу питания синусоидально или трапецеидально.
Ротор

Самыми распространёнными и дешёвыми для изготовления ротора считаются ферритовые магниты, но их недостатком является низкий уровень магнитной индукции, поэтому на замену такому материалу сейчас приходят приборы, созданные из сплавов различных редкоземельных элементов, поскольку могут предоставить высокий уровень магнитной индукции, что, в свою очередь, позволяет уменьшить размер ротора.
ДПР
Датчик положения ротора обеспечивает обратную связь. По принципу работы устройство делится на такие подвиды:
- индуктивный;
- фотоэлектрический;
- датчик с эффектом Холла.
Последний тип получил наибольшую популярность благодаря своим практически абсолютным безынерционным свойствам и способности избавляться по положению ротора от запаздывания в каналах обратной связи.
Система управления
Система управления состоит из силовых ключей, иногда также из тиристоров или силовых транзисторов, включающих изолированный затвор, ведущих к сбору инвертора тока либо инвертора напряжения. Процесс управления этими ключами реализуется чаще всего путём использования микроконтроллера, требующего для управления двигателем огромного количества вычислительных операций.
Использование
Постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт. В более мощной аппаратуре их применение нерационально. Также стоит отметить, что магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям. Индукционные и щеточные варианты лишены таких недостатков. Двигатели активно используются в автомобильных приводах благодаря отсутствию трения в коллекторе. Среди особенностей нужно выделить равномерность вращающего момента и тока, что обеспечивает снижение акустического шума.
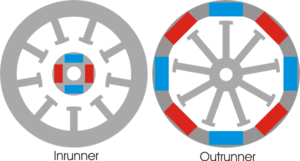
Двигатели в мультироторных аппаратах бывают двух типов: коллекторные и бесколлекторные. Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в .
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.
Управление щёточными моторами с Arduino
Как вы знаете, никакую нагрузку мощнее светодиода нельзя подключать к Ардуино напрямую, особенно моторчики. Ардуино, да и вообще любой микроконтроллер – логическое устройство, которое может давать только логические сигналы другим железкам, а те уже могут управлять нагрузкой. Кстати, урок по управлению мощной нагрузкой постоянного и переменного тока у меня тоже есть. “Драйвером” мотора могут быть разные железки, рассмотрим некоторые из них.

При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать:
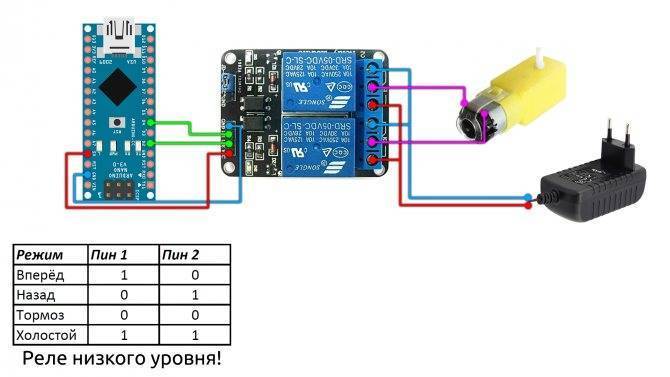
Купить модуль реле можно на Aliexpress.

Вместо “голого” мосфета можно использовать готовый китайский модуль:
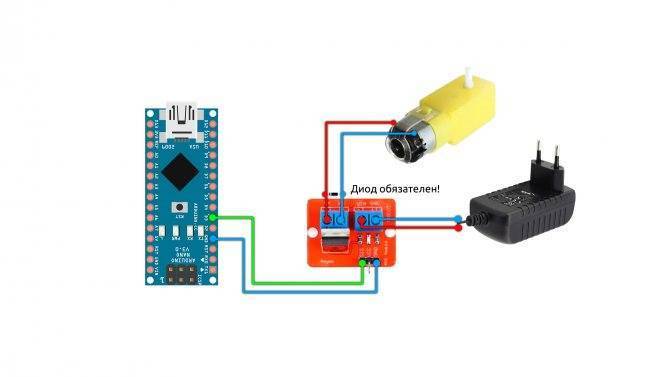
Купить мосфет модуль можно на Aliexpress.
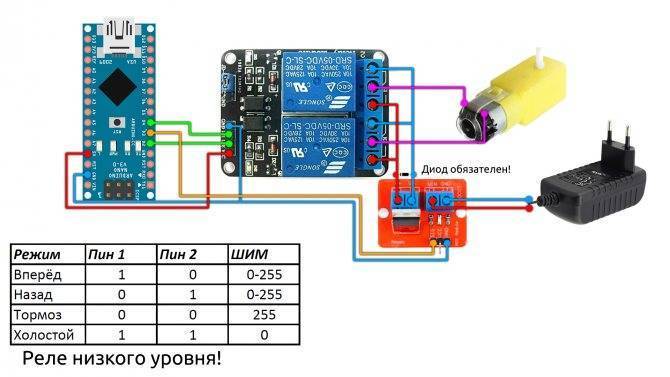
Если объединить реле и мосфет – получим весьма колхозную, но рабочую схему управления скоростью и направлением мотора:
Специальный драйвер
Лучше всего управлять мотором при помощи специального драйвера, они бывают разных форм и размеров и рассчитаны на разное напряжение и ток, но управляются практически одинаково. Рассмотрим основные драйверы с китайского рынка:
| Драйвер | Vmot | Ток (пик) | Стоимость | Aliexpress |
| L298N | 4-50V | 1A (2A) | 100р | Купить |
| MX1508 | 2-9.6V | 1.5A (2.5A) | 20р | Купить |
| TA6586 | 3-14V | 5A (7A) | 100р (чип 30р) | Купить, купить, купить чип |
| L9110S | 2.5-12V | 0.8A (1.5A) | 50р | Купить |
| TB6612 | 4.5-13.5V | 1.2A (3A) | 80р | Купить |
| BTS7960 | 5.5-27V | 10A (43A) | 300р | Купить |
| Большой | 3-36V | 10A (30A) | 700р | Купить |
Остальные драйверы смотри у меня вот тут. Схемы подключения и таблицы управления:
Управление БДПТ

Регулятор оборотов, внешний вид
Для управления бесколлекторным двигателем используется специальный контролер — регулятор скорости вращения вала двигателя постоянного тока. Его задачей является генерация и подача в нужный момент на нужную обмотку необходимого напряжения. В контроллере для приборов с питанием от сети 220 В чаще всего используется инверторная схема, в которой происходит преобразование тока с частотой 50 Гц сначала в постоянный ток, а затем в сигналы с широтно-импульсной модуляцией (ШИМ). Для подачи питающего напряжения на обмотки статора используются мощные электронные ключи на биполярных транзисторах или других силовых элементах.









Регулировка мощности и числа оборотов двигателя осуществляется изменением скважности импульсов, а, следовательно, и действующим значением напряжения, подаваемого на обмотки статора двигателя
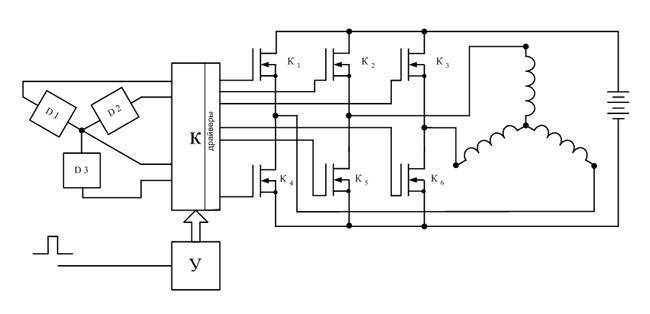
Принципиальная схема регулятора оборотов. К1-К6 — ключи D1-D3 — датчики положения ротора (датчики Холла)
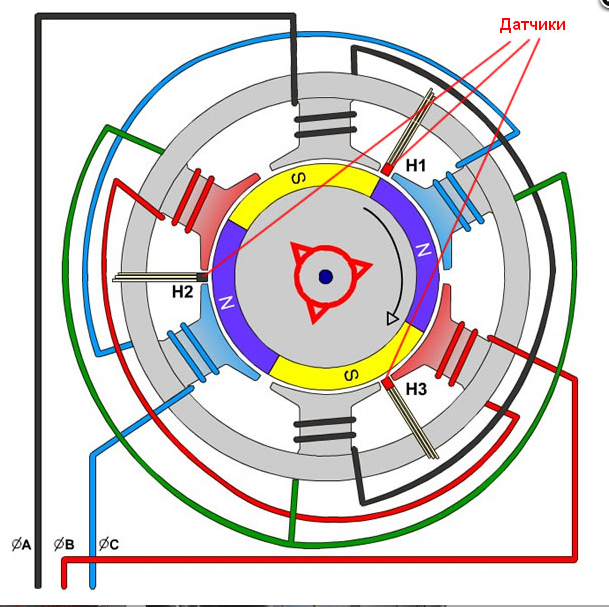
Важным вопросом является своевременное подключение электронных ключей к каждой обмотке. Для обеспечения этого контроллер должен определять положение ротора и его скорость. Для получения такой информации могут быть использованы оптические или магнитные датчики (например, датчики Холла), а также обратные магнитные поля.
Более распространено использование датчиков Холла, которые реагируют на наличие магнитного поля. Датчики размещаются на статоре таким образом, чтобы на них действовало магнитное поле ротора. В некоторых случаях датчики устанавливают в устройствах, которые позволяют изменять положение датчиков и, соответственно, регулировать угол опережения (timing).
Регуляторы оборотов вращения ротора очень чувствительны к силе тока, проходящего через него. Если вы подберете аккумуляторную батарейку с большей выдаваемой силой тока, то регулятор сгорит! Правильно подбирайте сочетания характеристик!
Особенности работы вентильных двигателей
Вентильные двигатели относятся к электрическим машинам специального назначения. Своим названием они обязаны применению в них устройств для выпрямления тока — вентилей. Достоинства вентильных электродвигателей:
- изменение скорости вращения в широких пределах;
- более высокий коэффициент полезного действия из-за уменьшения магнитных потерь вследствие малого магнитного сопротивления;
- даже при пиковой нагрузке рабочие характеристики довольно неплохи.
Наряду с преимуществами, они имеют и некоторые недостатки. Но значение их не велико. Основными являются:
- шумность;
- управление требует определённой квалификации обслуживающего персонала;
- высокая цена.
 Области применения их различны: на производстве по добыче нефти, в химической промышленности и установках для бурения скважин.
Области применения их различны: на производстве по добыче нефти, в химической промышленности и установках для бурения скважин.
Основная разница между вентильным и обычным двигателем заключается в конструкции. У вентильного нет некоторых привычных частей конструкции: коллектора и щёточного механизма. Вместо этого установлен коммутатор (инвертор), с помощью которого осуществляется управление вентильным двигателем. На инвертор поступает сигнал от датчика положения ротора.
https://youtube.com/watch?v=uPdv7l9zx2c
Датчиками положения ротора могут быть трансформаторные или индуктивные бесконтактные элементы. Наиболее распространёнными являются датчики электродвижущей силы Холла. Такое устройство состоит из небольшой пластины полупроводникового материала. На ней находятся контактные звенья, к которым припаяны выводы, соединённые с источником питания. Выводы выходного сигнала также припаиваются к соответствующим звеньям пластины. Требованиями к датчикам положения ротора являются:
- компактность;
- минимальное значение мощности на входе;
- большая кратность сигнала как максимального, так и минимального;
- надёжная работа при любых условиях окружающей среды.
 Коммутатор выполнен на полупроводниках. Его задача аналогична задаче щёточно-коллекторного узла в обычных двигателях и заключается в изменении направления тока. На сердечнике станины находится обмотка якоря, а на роторе — постоянный магнит. Такая конструкция устраняет возможность скольжения контакта на якоре.
Коммутатор выполнен на полупроводниках. Его задача аналогична задаче щёточно-коллекторного узла в обычных двигателях и заключается в изменении направления тока. На сердечнике станины находится обмотка якоря, а на роторе — постоянный магнит. Такая конструкция устраняет возможность скольжения контакта на якоре.
У вентильного двигателя ток в фазах синусоидального вида. Возбуждение у него может быть двух видов:
- электромагнитное;
- магнитоэлектрическое.
При электромагнитном возбуждении обмотка возбуждения располагается на полюсах. Она подключается к сети благодаря контактным кольцам, размещённым на валу ротора. Таким образом, создание магнитного поля происходит электромагнитным путём.
Отличия коллекторного и бесколлекторного двигателя
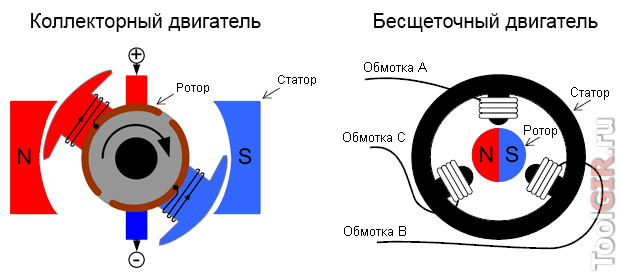
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.

Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Применение
Области применения БДТП следующие:
- создание моделей;
- медицина;
- автомобилестроение;
- нефтегазовая промышленность;
- бытовые приборы;
- военная техника.

Использование БД для авиамоделей дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета. Благодаря малому шуму и отсутствию нагревания при работе БДПТ широко используются в медицине, особенно в стоматологии.
В автомобилях такие двигатели используются в подъемниках стекол, электростеклоочистителях, омывателях фар и электрорегуляторах подъема кресел.
Отсутствие коллектора и искрения щеток позволяет использовать БД в качестве элементов запорных устройств в нефтегазовой промышленности.
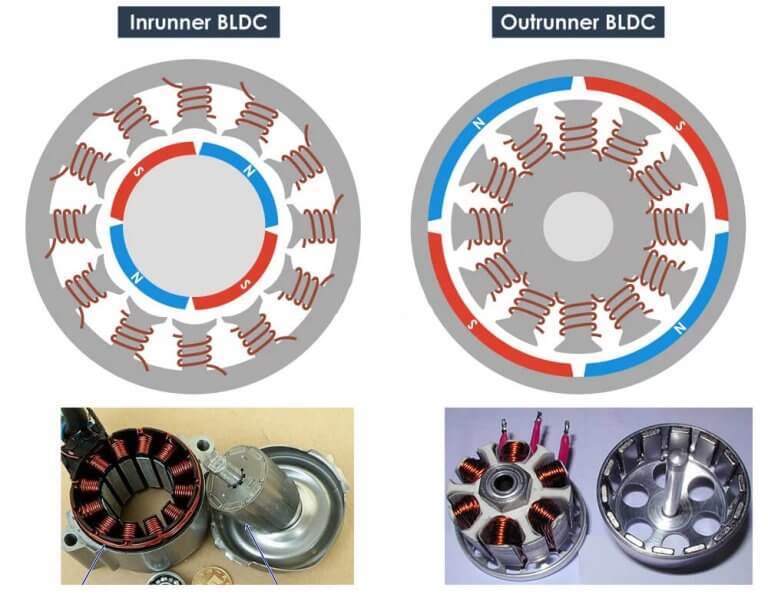
В качестве примера использования БД в бытовой технике можно отметить стиральную машину с прямым приводом барабана компании LG. Эта компания использует БДТП типа Outrunner. На роторе двигателя имеется 12 магнитов, а на статоре – 36 катушек индуктивности, которые намотаны проводом диаметром в 1 мм на сердечники из магнитопроводящей стали. Катушки соединены последовательно по 12 штук в фазе. Сопротивление каждой фазы равно 12 Ом. В качестве датчика положения ротора используется датчик Холла. Ротор двигателя крепится к баку стиральной машины.










Повсеместно данный двигатель используется в жестких дисках для компьютеров, что делает их компактными, в CD и DVD приводах и системах охлаждения для микро-электронотехнических устройств и не только.
Наряду с БД малой и средней мощности в промышленности с тяжелыми условиями работы, судовой и военной промышленностях все больше используются большие БДПТ.
БД большой мощности разработаны для американских ВМС. Например, компания Powertec разработала БДТП мощностью 220 кВт со скоростью в 2000 об/мин. Момент двигателя достигает 1080 Нм.
Кроме указанных областей, БД применяются в проектах станков, прессов, линий для обработки пластмасс, а также в ветроэнергетике и использовании энергии приливных волн.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
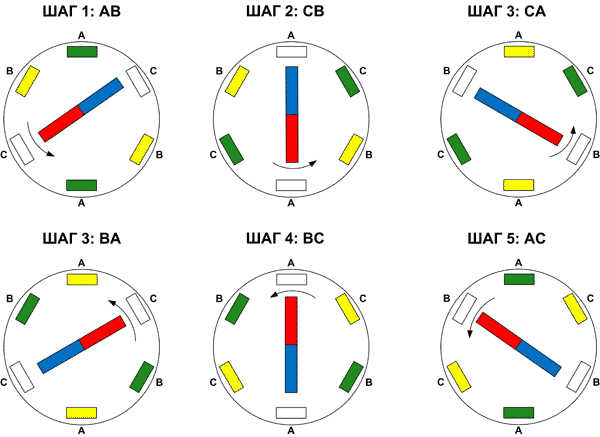
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмоткамиРисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.






Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Рекомендуем:
 Как рассчитать электроснабжение строительной площадки?
Как рассчитать электроснабжение строительной площадки?
 Что такое электрическая оболочка?
Что такое электрическая оболочка?
 Почему в многоэтажные дома электропитание подключают звездой, а не треугольником?
Почему в многоэтажные дома электропитание подключают звездой, а не треугольником?
 Коллекторный двигатель постоянного и переменного тока
Коллекторный двигатель постоянного и переменного тока
 Способы запуска электродвигателя постоянного тока
Способы запуска электродвигателя постоянного тока
 Почему на управляющую часть схемы двигателя подают постоянный ток?
Почему на управляющую часть схемы двигателя подают постоянный ток?
 Какова схема подключения искрогасящих конденсаторов на коллекторный двигатель?
Какова схема подключения искрогасящих конденсаторов на коллекторный двигатель?
 Генератор постоянного тока: устройство, принцип работы, классификация
Генератор постоянного тока: устройство, принцип работы, классификация
 Вопрос по запуску маломощного однофазного двигателя
Вопрос по запуску маломощного однофазного двигателя
 Преобразователь частоты — векторный, однофазный, схемы и инструкции
Преобразователь частоты — векторный, однофазный, схемы и инструкции







