Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
 Трехфазный генератор переменного тока
Трехфазный генератор переменного тока
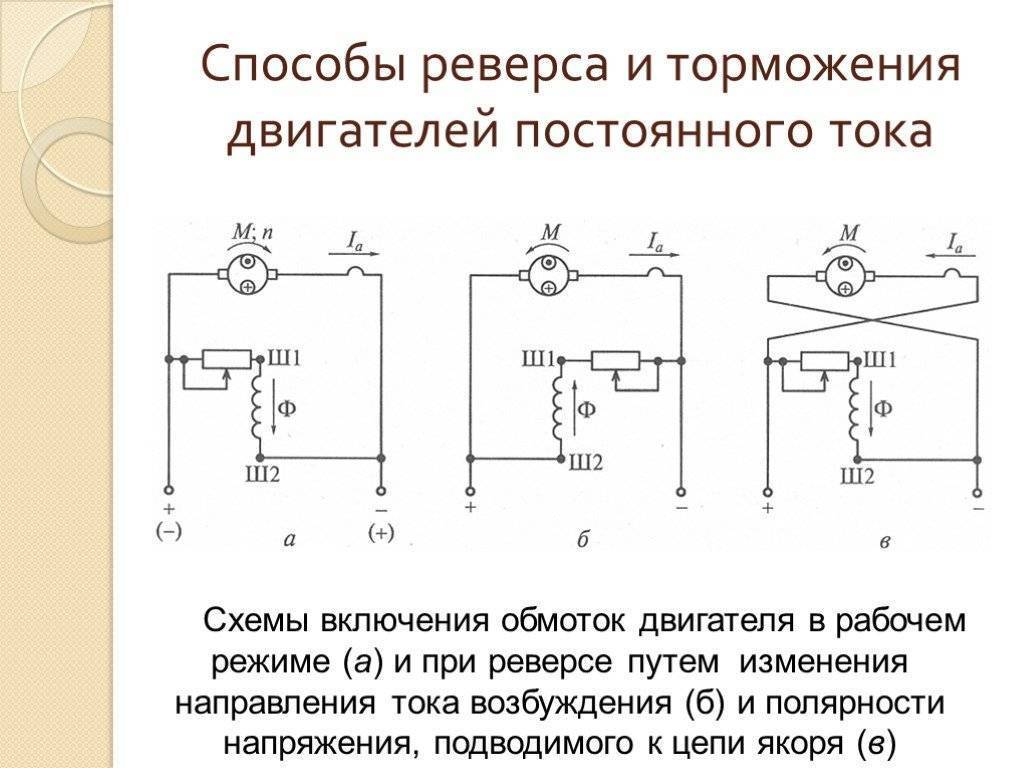
Пуск путем изменения питающего напряжения
Одной из самых сложных считается схема снижения пусковой нагрузки с применением управляемого выпрямителя или, как вариант, генератора постоянного напряжения, на плечи которого и ложится задача снижения питающего номинала по току.
В принципе с этой задачей справляется и реостат, но для электродвигателей повышенной мощности КПД реостата резко снижается. Использование отдельной микросхемы для изменения питающего напряжения позволяет снизить потери.
Вариант с генератором или выпрямителем используется на эл. моторах повышенной мощности. У него имеется еще один плюс: возможность реверсирования, которое реализуется изменением направления протекания тока в якоре.
Кнопочный пост
Данное оборудование предназначается для коммутации, то есть соединения цепей, в которых протекает переменный ток с максимальным напряжением в 660 В и частотой 50 или 60 Гц. Можно эксплуатировать такие устройства и в сетях с постоянным током, но тогда максимальное рабочее напряжение ограничивается 440 В. Возможно применение даже в качестве пульта управления.
Советуем изучить — Эксплуатация комплектных трансформаторных подстанций

Обычный кнопочный пост имеет следующие особенности своей конструкции:
- Каждая из его кнопок лишена фиксации.
- Имеется кнопка «Пуск», которая чаще всего имеет не только зеленый цвет, но и контакты нормально-разведенного типа. Некоторые модели даже обладают подсветкой, которая включается после нажатия. Предназначение — введение в работу какого-либо механизма.
- «Стоп» — это кнопка, обладающая красным цветом (чаще всего). Располагается она на замкнутых контактах, а ее основное предназначение — это отключение какого-либо прибора от источника питания с целью остановки его работы.
- Отличие между некоторыми приборами состоит в материале, который используется для изготовления каркаса. Он может быть сделан из металла или пластмассы. В данном случае корпус играет важную роль, так как имеет определенную степень защиты, зависящую от материала.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.
Применение сопротивления при пуске
Метод применим для асинхронных двигателей, подключаемых к однофазной сети, и имеющих первичную дополнительную обмотку с короткозамкнутым ротором. Так называют мотор с расщепленной фазой, электроцепь которого имеет высокое активное сопротивление.
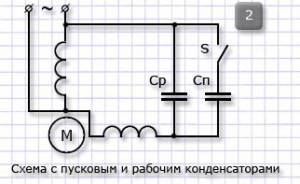
Чтобы пустить в ход двигатель, питаемый от однофазной сети, необходим пусковой резистор, соединяемый последовательно с дополнительной намоткой. Тогда сдвиг фаз составляет 30 градусов. Этого хватает для разгона. Ниже представлена схема, согласно которой достигается омический сдвиг фаз.
Вместо резистора можно применить дополнительную обмотку высокого сопротивления, но низкой индуктивности. В этом случае намотка имеет мало витков, которые выполняются из провода меньшего сечения в отличие от того, что используется для рабочей намотки.
В России с конвейера выходят моторы, подключаемые к однофазной сети, оснащенные резистором для сдвига фаз. Их мощность варьируется в диапазоне 18-600 Вт. Двигатели рассчитаны для сетей с напряжением 127, 220 или 380 Вольт и переменным током с частотой 50 Гц.





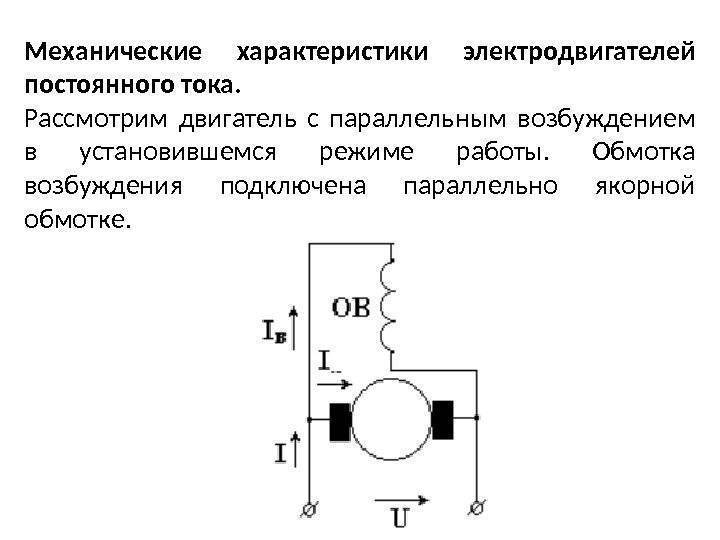



Двигатель постоянного тока. Схемы соединения и характеристики ДПТ
Двигатель постоянного тока нашел широкое применение в различных областях деятельности человека. Начиная от использования тягового привода, применяемого в трамваях и троллейбусах, заканчивая приводом прокатных станов и подъемных механизмов, где требуется поддержание высокой точности скорости вращения.
Основные положительные особенности, которые отличают ДПТ от асинхронного двигателя:
| — гибкие пусковые и регулировочные характеристики; | ||
| — двухзонное регулирование, которое позволяет достигать скорости вращения более 3000 об/мин. |
Отрицательные черты:
| — сложность в изготовлении и высокая стоимость; | ||
| — в процессе работы необходимо постоянное обслуживание, так как коллектор и токосъемные щетки имеют небольшой ресурс работы. |
Двигатель постоянного тока применяют только тогда, когда применение двигателя переменного тока невозможно или крайне нецелесообразно. В среднем, на каждые 70 двигателей переменного тока приходится всего лишь 1 ДПТ.
Конструкция ДПТ
Двигатель постоянного тока состоит из:
| — индуктора (статора); | ||
| — якоря (ротора); | ||
| — коллектора; | ||
| — токосъемных щеток; | ||
| — конструктивных элементов. |
Якорь и индуктор разделены между собой воздушным зазором. Индуктор представляет из себя станину, которая служит для того, чтобы закрепить основные и добавочные полюса магнитной системы двигателя. На основных полюсах располагаются обмотки возбуждения, а на добавочных – специальные обмотки, которые способствуют улучшению коммутации.
Коллектор подводит постоянный ток к рабочей обмотке, которая уложена в пазы ротора. Коллектор имеет вид цилиндра и состоит из пластин, изолированных друг от друга, он насажен на вал двигателя. Щетки служат для съема тока с коллектора, они крепятся в щеткодержателях для обеспечения правильного положения и надежного нажатия на поверхность коллектора.

Рисунок 1 – Конструкция двигателя постоянного тока
Двигатели постоянного тока классифицируют по магнитной системе статора:
1) ДПТ с постоянными магнитами;
2) ДПТ с электромагнитами:
| — ДПТ с независимым возбуждением; | ||
| — ДПТ с последовательным возбуждением; | ||
| — ДПТ с параллельным возбуждением; | ||
| — ДПТ со смешанным возбуждением. |
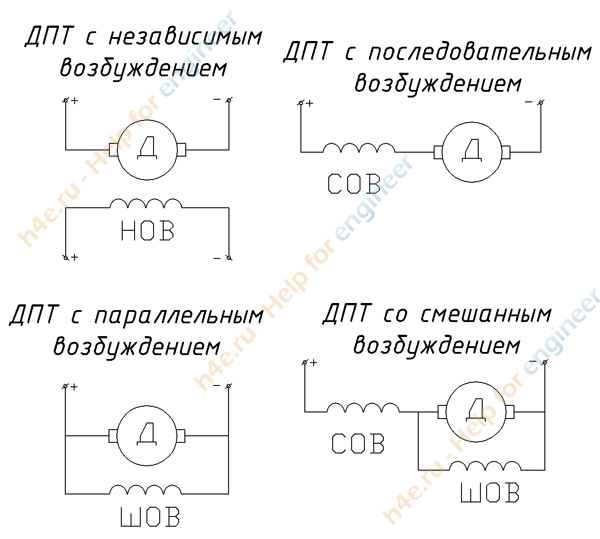
Рисунок 2 – Схемы подключения двигателя постоянного тока
Схема подключения обмоток статора существенно влияет на электрические и тяговые характеристики привода.
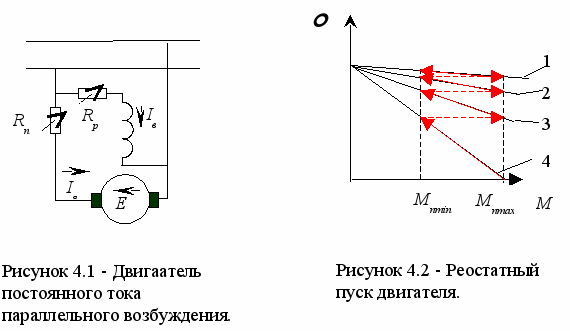
Пуск двигателя постоянного тока
Пуск двигателя постоянного тока производят с помощью пусковых реостатов, которые представляют собой активные сопротивления, подключенные к цепи якоря. Выполняют реостатный пуск по двум причинам:
| — при необходимости плавного разгона электродвигателя; | ||
| — в начальный момент времени, пусковой ток Iп = U / Rя очень большой, что вызывает перегрев обмотки якоря (которая имеет малое сопротивление). |
Только ДПТ мощностью до 1 кВт допускают к старту без пусковых реостатов, так называемый «прямой пуск».

Рисунок 3 – Реостатный пуск двигателя с 3 ступенями
В начале запуска к цепи ротора подключаются все сопротивления, и по мере увеличения скорости они ступенчато выводятся.
Регулирование скорости вращения
Частота вращения двигателя постоянного тока выражается формулой:
Это выражение так же называется электромеханической характеристикой ДПТ, в которой:
| U – питающее напряжение; | ||
| Iя – ток в якорной обмотке; | ||
| Rя – сопротивление якорной цепи; | ||
| k – конструктивный коэффициент двигателя; | ||
| Ф – магнитный поток двигателя. |
Формула момента двигателя:
Подставив в формулу электромеханической характеристики,получим:
Таким образом, исходя из приведенных формул, сделаем вывод, что скорость вращения ДПТ можно регулировать, изменяя сопротивление якоря, питающее напряжение и магнитный поток.
Соединение ротора с реостатом во время включения
Метод подходит для включения в работы моторов с фазным ротором. Если роторная цепь включает в себя реостат, то активное сопротивление повышается. При этом точка К на рисунке а ниже перемещается ближе к О и обозначается К`. Это не приводит к уменьшению Ммакс, зато обеспечивает повышение Мпуск. Вместе с этим критическое скольжение увеличивается, и зависимость момента от s смещается к зоне больших скольжений. Число же оборотов смещается в зону меньших вращательных частот (рисунки б и в).
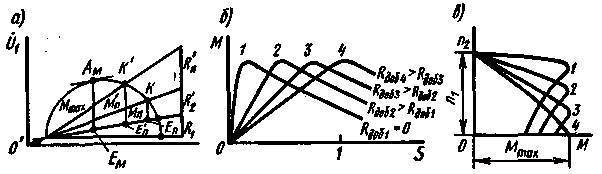
Обычно реостат, используемый для пуска мотора, имеет от 3 до 6 ступеней (смотрите рисунок а ниже). Пусковое сопротивление плавно уменьшается, что обеспечивается большой Мпуск. Изначально мотор приводится в ход по четвертой характеристике, проиллюстрированной на рисунке б. Она соответствует сопротивлению запускающего реостата и обеспечивает максимальную пусковую мощность.










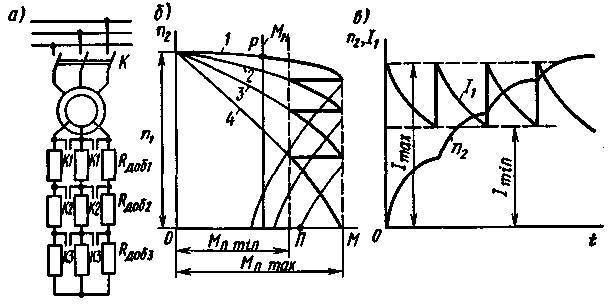
Вращающий момент (Мвр) уменьшается с ростом оборотов. При некотором минимальном значении необходимо отключить часть реостата, чтобы Мвр возрос снова до максимального (смотрите третью характеристику). Но обороты растут, поэтому Мвр снова уменьшается. Тогда отключается еще одна часть реостата, и начинается работа по второй характеристике. Когда реостат двигателя с фазным ротором отключают вовсе, пусковой процесс завершается. Мотор продолжает работу по характеристике 1.
Запуск в ход таким методом характеризуется изменением Мвр от максимального до минимального значения. Сопротивление в данном случае уменьшается ступенчато по ломаной кривой линии (выделена жирным на графике). Выключение частей реостата осуществляется автоматически или вручную.
Преимущество запуска электродвигателя с фазным ротором с использованием реостата заключается в возможности включать его при Мпуск, близком к Ммакс. Пусковые токи при этом минимальны. Изменение силы тока проиллюстрировано на рисунке в.
Недостатков хватает. Во-первых, это сложность включения. Во-вторых, это необходимость использования совсем не дешевых моторов с фазным ротором. Характер работы хуже, чем у аналогов с короткозамкнутым ротором при мощности одинакового значения – это третий минус. Это объясняет, почему электродвигатели с фазным ротором используют преимущественно в случае возникновения сложностей с запуском других двигателей.
Аспекты запуска
Принцип работы СД накладывает ряд требований, без выполнения которых не только плавный пуск, но и сам запуск синхронного эл/мотора невозможен. В СД вращающееся поле создается трехфазным током в цепях статора. При этом мощность, развиваемая на валу электродвигателя, компенсируется мощностью, поступающей из питающей сети. То есть взаимодействием тока статорного устройства с полем роторного механизма инициируется возникновение крутящего момента.
Как уже упоминалось, скорости ротора и поля статорного узла синхронны. При возникновении разницы в какой-то период времени полюса роторно-статорного механизма расположатся друг напротив друга. В результате магнитная связь нарушится, поскольку одноименные полюса будут отталкиваться. Ротор перестанет испытывать действие крутящего момента и остановится. Поэтому обеспечение одновременности вращения для синхронного двигателя является основополагающим условием его функционирования.
Но осуществление самостоятельного пуска в работу с прямым сетевым подключением невозможен. Роторный механизм по причине своей инерционности не способен быстро достичь частоты поля статора, тогда как вращение последнего устанавливается одновременно с подключением к сети электропитания. Поэтому между полюсами возбужденного роторного узла и вращающегося поля устойчивая связь, создающая вращающий момент, не возникает.
Подписка на рассылку
При подаче напряжения на электродвигатель происходит скачок напряжения, который называется пусковым током. Пусковой ток часто выше номинального от 5 до 10 раз, но отличается своей кратковременностью.
Процессы, протекающие при пуске двигателя
Когда на обмотке статора увеличивается токовая нагрузка, одновременно с этим увеличивается крутящий момент двигателя, передающийся на вал ротора. Резкое увеличение крутящего момента может вызвать резкое повышение температуры обмотки статора и привести к неисправностям в изоляции, что может стать причиной вибраций, механических деформаций и выхода двигателя из строя.
Чтобы избежать поломки электродвигателя, сразу после начала его работы пусковой ток понижается до номинальных частот вращения. Для снижения пускового тока применяют несколько способов, которые также позволяют стабилизировать напряжение электропитания. Существует несколько способов запуска двигателей постоянного тока.
При прямом пуске подключение обмотки якоря происходит непосредственно к электрической сети. Это означает, что двигатель подключается к источнику электропитания при своем номинальном напряжении. Прямой пуск электродвигателя используется, когда есть стабильное питание двигателя, который жестко связан с приводом. Это один из самых простых методов пуска.
Преимуществом прямого пуска является то, что при таком запуске температура повышается не столь значительно, если сравнивать с другими методиками. Если отсутствуют специальные ограничения на поступающий от электросети ток, то такой способ считается наиболее предпочтительным. Те электродвигатели, что предназначаются для частых пусков и отключений, оборудуются специальной системой управления, с контактором и термореле, которые защищают прибор от поломки.
Если электродвигатели имеют малую мощность и работают без частых остановок и пусков, то для его включения требуется самое примитивное оборудование. Обычно им является вручную работающий расцепитель. При такой схеме непосредственно на сами клеммы двигателя и подается напряжение. Для электродвигателей небольших размеров пусковой момент составляет 150–300 % от номинального, а сам пусковой ток — 300–800%.
Прямой пуск имеет то ограничение, что пик нагрузки некоторых крупных двигателей может быть в 15, а иногда и в 50 раз больше номинального. Такие нагрузки совершенно недопустимы, поэтому такой способ пуска применяется лишь на двигателях малой мощности.
Реостатный пуск электродвигателя постоянного тока
Реостатный пуск, в отличие от прямого, не имеет ограничений на мощность двигателя, поэтому его часто применяют на приборах большой мощности. Реостат для пуска изготавливается из провода, который имеет высокое удельное сопротивление и разделен на секции. Ток возбуждения, который возникает при включении двигателя, устанавливается таким образом, чтобы соответствовать номинальным значениям. Это необходимо для того, чтобы при пуске развивался максимально большой допустимый момент, что необходимо для быстрого разгона двигателя.
Методы включения
Исходя из того, что прямой пуск невозможен, включение в рабочий процесс синхронного двигателя осуществляется с выполнением дополнительных мероприятий. Вне зависимости от способов пуска в действие электропривода суть каждого заключается в предварительном приведении подвижной части в движение с оборотами, близкими к частоте основного поля.
При пуске поток настолько медленно перемещается относительно магнитных центров крутящегося вала, что при подключении возбуждающей электрообмотки к источнику питания между роторными полюсами и полем статора устанавливается магнитная связь. Именно она обеспечивает возникновение одинакового электромагнитного момента. Под его действием вал электромотора втягивается в синхронизм.
Существуют несколько способов пуска синхронных двигателей. Практическое применение получили три из них:
- посредством вспомогательного электрооборудования;
- асинхронный, в том числе автотрансформаторный и реакторный пуск;
- частотный пуск синхронного двигателя.
Каждая схема пуска синхронного двигателя имеет свои достоинства и недостатки относительно сложности конструктивного и технического исполнения, финансовых затрат, габаритов приводных узлов. Поэтому там, где оптимальным будет, например, реакторный пуск, более дорогостоящий частотный разумнее не применять. Какой способ станет оптимальным, зависит от множества факторов.
Пуск и остановка синхронного двигателя должны выполняться с соблюдением определенной последовательности действий и условий. Поэтому для снижения риска выхода из строя электропривода на старте предусматривается система защиты синхронного двигателя от затянувшегося включения. А на стадии остановки соблюдают следующий алгоритм:
- снижают ток возбуждения до величины равной минимальным токовым параметрам статора;
- отключают статорный узел;
- размыкают возбуждающую электроцепь.
Отклонение от этой последовательности чревато скачком токовых величин в статоре, перенапряжениям и, как следствие, нарушением целостности изоляции.
Пуск через автотрансформатор
Что такое пуск через автотрансформатор
Как видно из названия, такой пуск осуществляется с помощью автотрансформатора, последовательно соединённого с электродвигателем во время пуска.
Преимущества
Автотрансформатор понижает напряжение (приблизительно 50-80 % от полного напряжения), чтобы обеспечить пуск при низком напряжении. В зависимости от заданных параметров напряжение снижается в один или два этапа. Понижение напряжения, подаваемого на электродвигатель одновременно, приведёт к уменьшению пускового тока и вращающего пускового момента, но данный способ пуска даёт самый высокий вращающий момент электродвигателя. Если в определённый момент времени к электродвигателю не подаётся питание, он не потеряет скорость вращения, как и в случае с пуском переключением «звезда — треугольник». Время переключения от пониженного напряжения к полному напряжению можно корректировать.









Недостатки
Помимо уменьшения пускового момента, способ пуска через автотрансформатор имеет ещё один недостаток. Как только электродвигатель начинает работать, он переключается на сетевое напряжение, что вызывает скачок тока.
Вращающий момент в зависимости от напряжения
Значения пускового момента пропорциональны квадрату напряжения.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Рекомендуем:
 Как рассчитать электроснабжение строительной площадки?
Как рассчитать электроснабжение строительной площадки?
 Что такое электрическая оболочка?
Что такое электрическая оболочка?
 Как добавить электроблокировку и дистанционное управление в реверсивную схему управления электродвигателем?
Как добавить электроблокировку и дистанционное управление в реверсивную схему управления электродвигателем?
 Пускатели ПМЛ 1220, 1100, 2100 и 2220
Пускатели ПМЛ 1220, 1100, 2100 и 2220
 Как правильно подключить пускатель ПМЛ 1220 от сети 220 Вольт?
Как правильно подключить пускатель ПМЛ 1220 от сети 220 Вольт?
 Почему в многоэтажные дома электропитание подключают звездой, а не треугольником?
Почему в многоэтажные дома электропитание подключают звездой, а не треугольником?
 Вопрос по запуску маломощного однофазного двигателя
Вопрос по запуску маломощного однофазного двигателя
 Какова схема подключения искрогасящих конденсаторов на коллекторный двигатель?
Какова схема подключения искрогасящих конденсаторов на коллекторный двигатель?
 Почему на управляющую часть схемы двигателя подают постоянный ток?
Почему на управляющую часть схемы двигателя подают постоянный ток?
 Коллекторный двигатель постоянного и переменного тока
Коллекторный двигатель постоянного и переменного тока